
Extrapolated Imagery Products
NWCSAF/GEO v2021
Table of Contents
1. Goal of the EXIM product
2. EXIM algorithm summary description
3. List of inputs for EXIM
4. Coverage and resolution
5. Description of EXIM outputs
6. Example of EXIM visualisation
Access to "Algorithm Theoretical Basis Document for the Extrapolated Imagery processor of the NWC/GEO" for a more detailed description.
1. Goal of the EXIM product
The EXIM processor applies kinematic extrapolation using atmospheric motion vectors (AMVs) for displacing SEVIRI/GOES-N/GOES-R/Himawari pixels and/or selected NWCSAF products. Thereby, one gets forecast imagery / NWCSAF products up to a lead time of 1 hour. AMVs are provided by the NWC/GEO High Resolution Wind processor (HrW). The catalogue of input undergoing extrapolation, from which the user can select, consists of:
- all SEVIRI channels except HRVIS / the Himawari channels in nominal resolution / GOES-N/GOES-R channels;
- the NWCSAF products 'cloud mask', 'cloud type', 'cloud top temperature and height', 'precipitating cloud', and 'convective rainfall rate', and the 'cloud phase' sub-product of 'cloud microphysics'.
2. EXIM algorithm summary description
The AMV field corresponding to a time interval T between current and precursor image is applied n times to the current image at time t, thus producing forecasts up to n*T minutes, with the maximum lead time in minutes being chosen by the user. For each pixel P0, the new location P1 (at t+T) is determined by applying the motion vector at the original pixel position. In a second extrapolation step (for t+2*T), the location of pixel P1 is extrapolated with the AMV that had been observed at P1 at starting time t. The repetitive application of the procedure yields trajectories under the assumption of a temporally invariable displacement field. When applying the trajectory field in order to make the kinematic forecasts, a distinction is made between continuous variables (e.g. brightness temperature) and categorical variables (e.g. cloud type).Processing of continuous variables
For pixels not at all touched by a trajectory, the post-processing step searches for adjacent pixels that have been assigned a value. This is done in order to prevent gaps in the forecast image which occur due to diverging AMVs. The search is carried out in 8 directions regularly arranged around a circle until it hits an already classified pixel in the respective direction. To obtain the parameter value for the pixel in question, a weighted average is computed from the values at the up to 8 neighbours. The weights are 1/r2, with r being the distance between the void pixel and its neighbour.
Processing of categorical variables
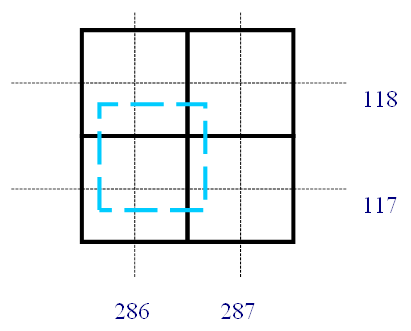
For categorical variables, the pixel value of the originating pixel is directly attributed to the new pixel location. The new pixel location is obtained by rounding the (usually) non-integer x- and y-coordinates from the trajectory. In the above example of a pixel forecast at position x=286.2/y=117.3, the parameter value at pixel 286/117 is set to the value of the original pixel. Here, pixels at positions 286/118, 287/117 and 287/118 are not impacted in this step. If accidentally another trajectory would target that pixel later, the parameter value is a guess just as good as the one assigned before. Of the possible arbitrary decision rules, overwriting is chosen in EXIM, i.e. the last candidate wins.
For pixels being not at all touched by a trajectory, the post-processing step searches for adjacent pixels that have been assigned a value. The search is in 8 directions regularly arranged around a circle until it hits an already classified pixel in the respective direction. From the up to 8 neighbours, the class to which the majority of neighbours belongs is determined and attributed to the target pixel. If there is a draw between two categories, a decision is made on the criterion which class has the lower sum-of-distances between the currently considered void pixel and the affected neighbours. If also this criterion leads to no decision, the selection is arbitrary, depending on the order in which the adjacent pixels were assembled.
CTTH filter
In case the optional cloud top height checking (new in v2021, exploiting the NWC/GEO CTTH product) is turned on, the appropriate layer and the associated set of neighbour AMVs is taken for each pixel. Note that if this option is chosen, it is assumed that the user wishes to suppress any extrapolation or gap filling that mixes information from levels with too large vertical distance. In this case, the procedure withholds pixels that are not inside the chosen HrW layers and it suppresses the post-processing steps described in the two preceding sections. The resulting gaps in the output have the “invalid” code characteristic for the respective product.
3. List of inputs for EXIM
Input to the EXIM processing are:- The NWC/GEO High Resolution Wind Package's auxiliary output "predecessor winds"
- The products which shall be extrapolated:
- SEVIRI data and/or Himawari and/or GOES-N/GOES-R data, channels according to user orders
- NWC/GEO product 'Cloud mask'
- NWC/GEO product 'Cloud type'
- NWC/GEO product 'Cloud top temperature and height'
- NWC/GEO product 'Cloud Microphysics'
- NWC/GEO product 'Precipitating clouds'
- NWC/GEO product 'Convective Rainfall Rate'
- NWC/GEO product 'Precipitating clouds - Physical Retrieval'
- NWC/GEO product 'Convective Rainfall Rate - Physical Retrieval'
- NWC/GEO product 'Cloud mask' in case the option is selected to extrapolate only cloudy pixels in satellite imagery
- NWC/GEO product 'Cloud Top Temperature and Height' in case the "CTTH filter" option is turned on
4. Coverage and resolution
- The products are extracted in nominal image resolution using the satellite projection.
- The region for processing is user-defined.
5. Description of EXIM outputs
- Forecast satellite images are delivered in netCDF format and follow the NWC/GEO convention on netCDF file naming. From v2021 on, the output file names feature an additional string "EXIM_" in order to avoid any ambiguity with the files containing the actual measurements.
- Associated (optional) difference images between forecast satellite imagery and the actual observation at the target date, analogously encoded in netCDF.
- NWCSAF products forecast with EXIM are encoded in netCDF files mimicking the format of the NWCSAF product file forming the input for the EXIM extrapolation. From v2021 on, the output file names feature an additional string "EXIM_" in order to avoid any ambiguity with the files containing the NWC/GEO input products.
- Besides the forecast fields, the files hold status/quality flags providing details on processing issues.
6. Example of EXIM visualisation
Figure 2 contrasts a 1-hour EXIM forecast of NWC/GEO PC-Ph with the product derived from the observations 1 hour later. A conspicuous feature of the forecast image is the meandering western edge, where displacement vectors point inward and no observations from regions further to the west were available to fill the image. The void region becomes larger with increasing leadtime and is a feature that might influence the decision on the covered domain.
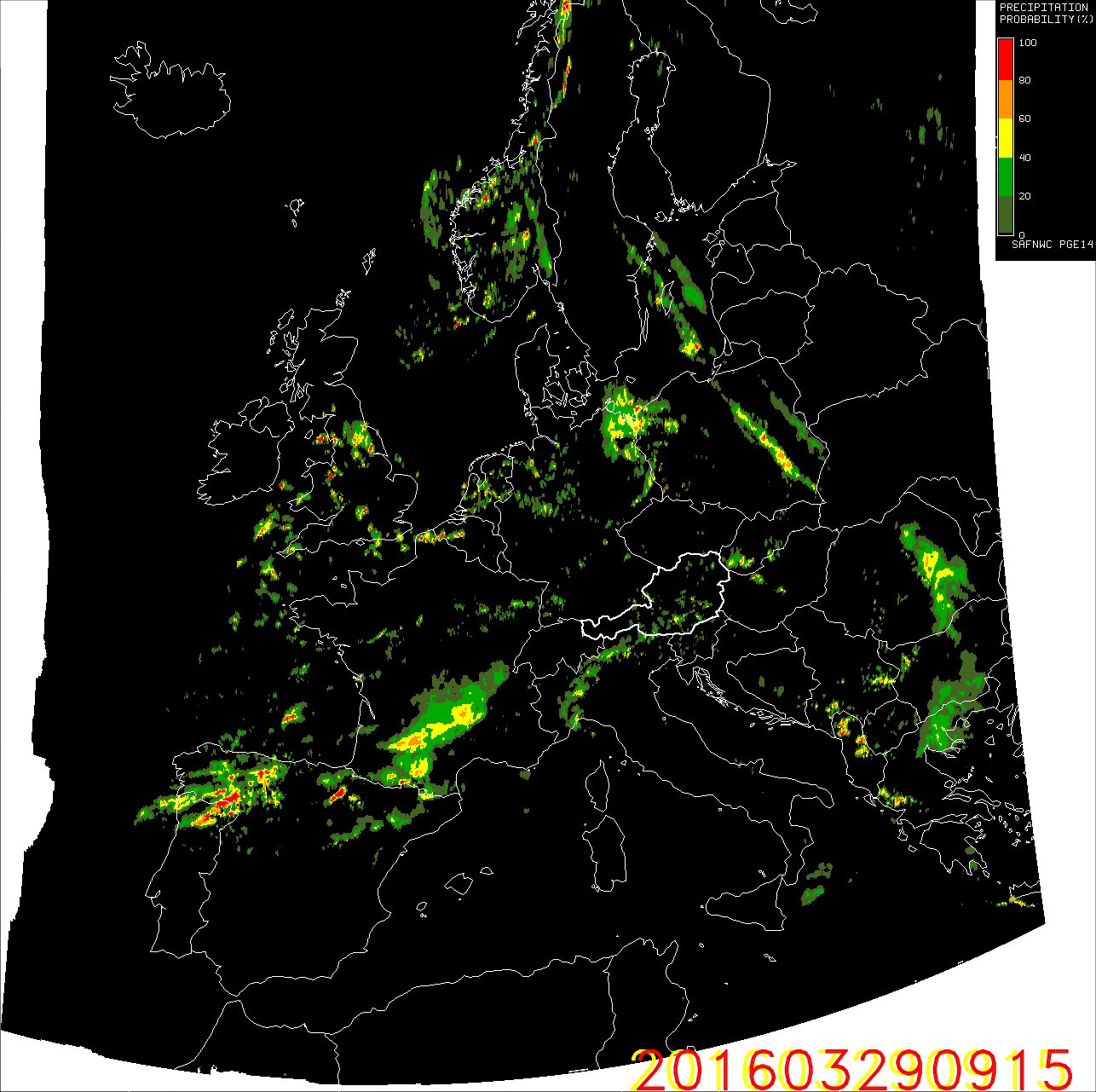
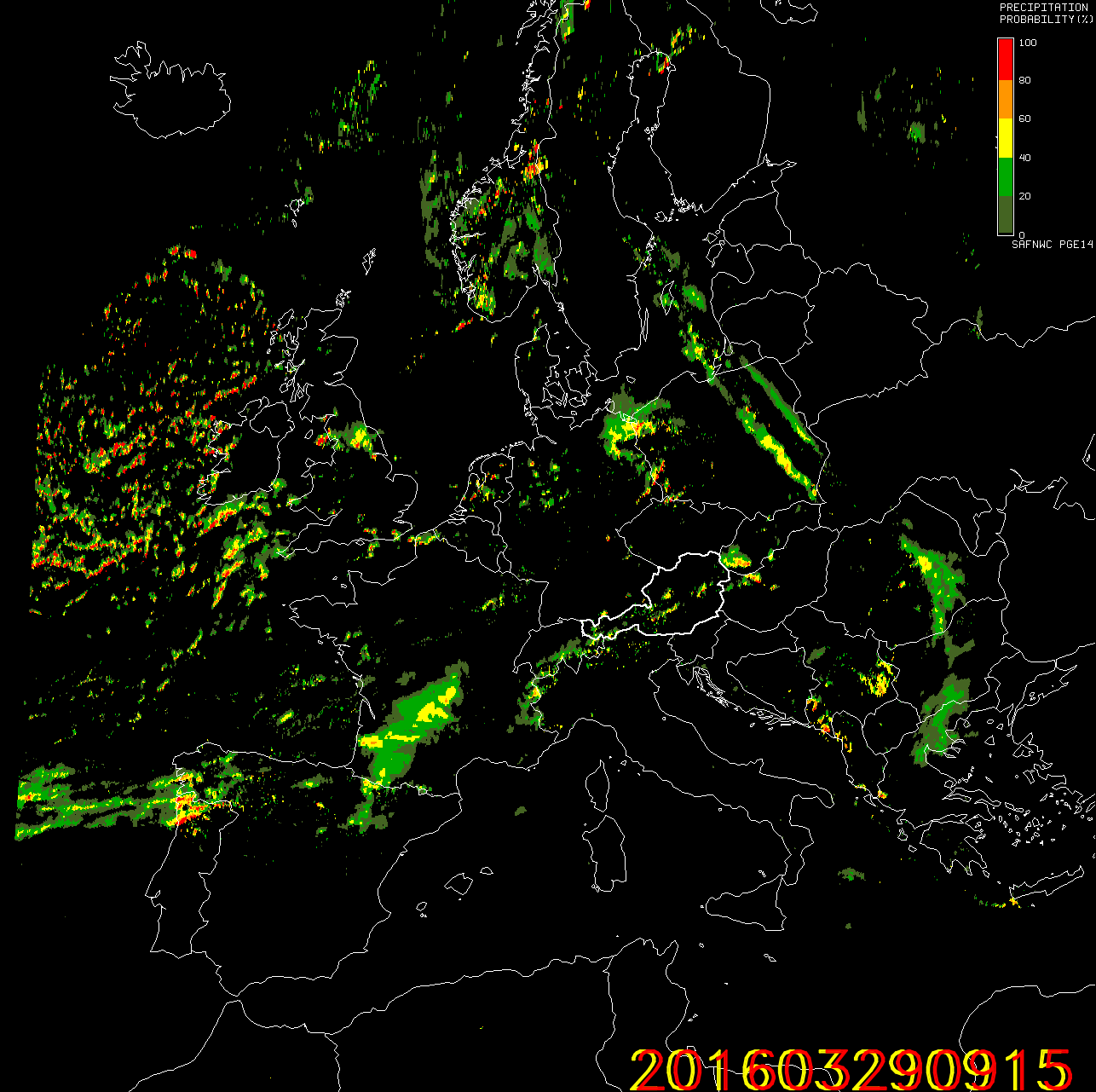
Figure 2: Left: "Precipitating Clouds – Physical Retrieval” (PC-Ph) product forecast for 29 March 2016, 09:15 UTC, based on the 08:15 UTC analysis. Right: The analysis at 29 March 2016, 09:15 UTC.